ものづくりの現場に於いて、センサは製品品質や工程の管理のために必須となっている。
本項ではその中でも寸法や動きの測定時に使用する変位センサについて、最新の技術情報について解説する。
工場内で距離を非接触で測定する「変位センサ」には、光・超音波・電流など様々な方式がある。しかし現在、工場のライン中で最も使用されているのは光(レーザ)を使った「レーザ変位センサ」である。
これはレーザ変位センサが最も汎用性が高いためである。
例えば超音波式変位センサは、音の反射する時間で距離を測定する。原理としては「やまびこ」と同じだが、音の速度はそれほど速くないため測定速度が遅くなる。
また一般的に分解能も0.1mm以上とそれほど高精度でもない。
また渦電流式変位センサは高精度に測定が可能だが、原理的に金属を近距離で測定することしかできない。
これに対しレーザ変位センサは、レーザを測定対象物に照射し、その反射角度を三角測量することで距離を演算する。(三角測量を使用しない方法もある)このため、対象物が光を反射しさえすれば測定が可能であり、非常に高い汎用性を持つ。
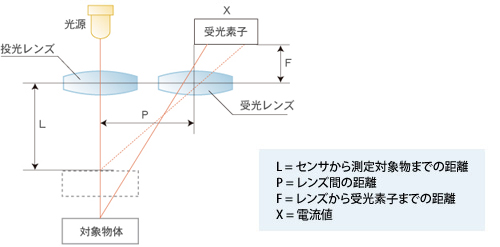
第1図
光源には主に赤色半導体レーザダイオード(630〜670nm)が使用される。これに投光レンズを通して、測定対象物に照射する。レーザ光は測定対象物上で拡散反射(あらゆる方向への反射)し、その一部が受光レンズに入光し、受光素子上に集光される(実線)。
ここで測定対象物が光源に近づくと、同じように反射光は受光素子上に集光されるが、その位置は変化する(点線)。受光素子上の集光位置Xと測定対象物までの距離Lの間には、
L / F = P / X
の関係が成り立つので、受光素子上の集光位置を検出すれば、測定対象物までの距離を求める事ができる。
またレーザ光が正反射する測定対象物(ガラス、鏡)においては、測定対象物への入射角と反射角がほぼ等しくなるように設置することで測定が可能となる。
投受光レンズ間距離Pや受光レンズ-受光素子間距離Fを設計上自由に決めることができる為、測定範囲数mmでサブミクロンの分解能を持つものから、測定範囲が1mに及ぶものまで、同一の原理と処理回路で実現する事ができる。このため高精度な半導体素子の位置決めや組み立てから、長距離の鉄鋼製造時の寸法測定まで幅広く使用されている。
前述のように汎用性の高い変位センサであるが、受光素子上で適切な強度の反射光を受光しなければ正しく距離を検出できない。
図のように強度が強すぎる場合も弱すぎる場合も、受光波形の頂点位置の算出は不正確になる。
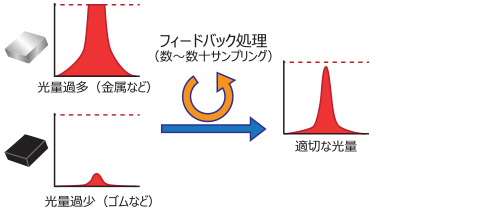
第2図 変位センサのフィードバック動作
変位センサではこうした受光量の変化に応じて発光時間・発行パワー・受光ゲイン・受光時間(シャッター時間)などを調整する機能を備えており、現在の受光状態に応じたフィードバックを行う事で、反射率の高い金属表面から、反射率の低い黒ゴムまでを一台で測定可能としている。 しかしこのフィードバックには数~数十サンプリングを要するため、継ぎ目などで急激に色が変化した瞬間は測定が不安定になる場合がある。