変位センサ(変位計)はFA(ファクトリーオートメーション)の領域において、製品もしくは半製品の距離、厚み、反り、段差などを測定するもので、⾃動化と品質管理の目的に使⽤される。
測定原理別に変位センサを分類すると、三角測量⽅式、TOF(Time-Of-Flight)型、静電容量型、渦電流型、超⾳波型、接触型などがある。これらはそれぞれの特徴を有しており、それぞれにふさわしいアプリケーションが存在するが、測定距離および範囲の設計⾃由度が⼤きく、非接触(主にレーザダイオード)測定で、かつ測定対象物を選ばない三角測量⽅式の変位センサの汎⽤性は非常に高く、半導体、ガラス、⾃動⾞、三品業界(⾷品、医薬品、化粧品)をはじめ、あらゆる分野で使⽤されている。本稿では、三角測量⽅式の変位センサの導⼊を検討しているユーザーが最も苦労するであろう「誤差の低減」について述べる。
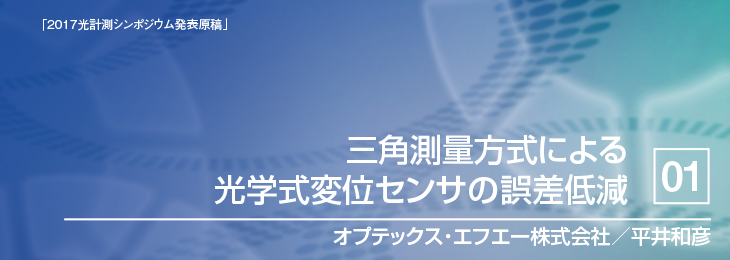
図1に三角測量⽅式の変位センサの原理を⽰す。光源には主に赤色半導体レーザダイオード(630〜670nm)が使⽤される。これを投光レンズを通し、測定対象物に照射する。レーザ光は測定対象物上で拡散反射(あらゆる⽅向への反射)し、その一部が受光レンズに⼊光し、受光素子上に集光される(図1のA)。
ここで測定対象物が光源から遠ざかると、同じように反射光は受光素子上に集光されるが、その位置は変化する(図1のA’)。
図2 に測定距離(変位センサから測定対象物までの距離)と受光素子上の集光位置の関係を⽰す。変位センサ内部のマイコンで集光位置から測定距離を逆算し、測定値を得る事が出来る。
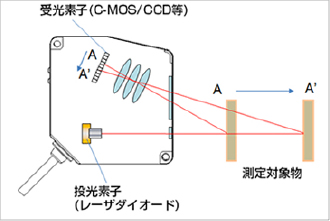 図1 三角測量⽅式の変位センサ測定原理
図1 三角測量⽅式の変位センサ測定原理
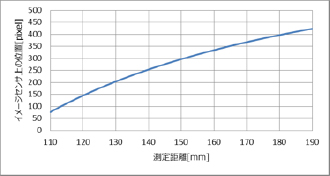 図2 測定距離と受光素⼦上の位置の関係
図2 測定距離と受光素⼦上の位置の関係
途中から色や材質が異なるワーク(測定対象物)を測定する場合、その移動⽅向により瞬間的に測定誤差が発生する場合がある。
図3はその様子を⽰したものである。レーザ光が色/材質の変化点に当たった場合、図の左側の設置⽅法の場合、受光素子上の集光部の色むらが、受光素子の幅⽅向に現れる為、誤差が原理上現れない。対して右側の場合、色むらが受光素子の⻑⼿⽅向(測距に使⽤する⽅向)に現れる為、僅かに誤差が発生する。
 図3 変位センサの設置とワークの移動⽅向
図3 変位センサの設置とワークの移動⽅向